1.三坐标测量的基本原理?
通过坐标测量机的探测系统移动,拟合形成测量元素,如平面、直线、圆、球、圆柱、圆锥、曲面等几何元素。利用几何元素的特征,如圆的直径、圆心点、面的法矢、圆柱的轴线、圆锥顶点等,可以计算这些几何元素之间的距离和位置关系,进行几何公差的评价。
2.手动测量与三坐标测量的区别?
手动测量是利用卡尺、千分尺等量具直接测量并读取测量值,三坐标测量则是基于坐标系工作,通过设计程序记录测量点,然后在计算机运算下得出测量值。
3.根据结构形式,三坐标测量机包括分哪几类?
直角坐标测量机和非正交系坐标测量机。
4.移动桥式、固定桥式、水平悬臂式、龙门式结构三坐标测量机的优缺点?
(1)移动桥式结构
优点:1)结构简单、紧凑,开敞性好;2)相对于固定桥式承载能力较大;
缺点:桥架单边驱动,Y方向有较大的阿贝臂。
(2)固定桥式结构
优点:相对于移动桥式,阿贝误差小,精度较高;
缺点:被测量对象由于放置在移动工作台上,降低了机器运动的加速度,承载能力较小;操作空间不如移动桥式开阔。
(3)水平悬臂式结构
优点:结构简单,开敞性好,测量范围大;
缺点:水平臂变形较大,补偿计算比较复杂。
(4)龙门式结构
优点:龙门式结构要比水平悬臂式结构的刚性好,对大尺寸测量而言具有更好的精度。
缺点:大型龙门式测量机多采用双光栅/双驱动模式,与移动桥式相比,有较小的阿贝误差,测量更加精准。
5.关节臂测量机与桥式测量机相比具有哪些优劣势?
劣势:与桥式坐标测量机相比,关节臂测量机精度有限。
优势:关节臂测量机具有对环境因素的不敏感,以及轻便、对场地占用小的特点,非常适合室外测量和被测工件不便移动的情况,广泛用于车间现场测量。
6.请阐述标准球倾斜角和旋转角的定义。
倾斜角:将陶瓷球看作坐标系原点,将支撑杆和机器坐标Z轴方向在空间的夹角定义为倾斜角。倾斜角可以通过参考球支撑杆与立柱之间的夹角来计算。
旋转角:旋转角需要从机器坐标的+Z轴方向俯视,把支撑杆和陶瓷球看成整体,然后投影到大理石平台上。将陶瓷球投影为一个点,并定义为原点,将支撑杆投影为一条线,以机器坐标的+X轴为起始,逆时针旋转直到与支撑杆的投影线重合,这个过程中旋转的角度定义为旋转角。
7.请阐述固定式测头和旋转式测头的特点?
固定式探测系统:指测头方向不能变化的测头,一般用于高精度扫描测头的安装与连接;
旋转式探测系统:一般具有两个方向上的回转自由度,从而实现了所安装测头在空间方位上的变化。
8.一个理想的探针系统应满足什么条件?
一个理想的探针系统需要尽量少的连接点、尽可能大的刚性、尽可能小的质量、尽可能小的温度敏感性。
9.请分析红宝石球的磨损现象和沉积现象产生的原因。
磨损现象:红宝石球在使用一段时间后会因扫描较硬的工件产生磨损,圆度变差,精度降低;
沉积现象:扫描较软的铝合金材质会在红宝石球表面产生沉积,同样造成圆度变差,精度降低。
10.请阐述测杆探测的危害。
测杆探测是指测杆代替了测球接触到了工件采集了测量信息,因为测头传感器无法分辨这个采集的信号来自测杆还是测球,在发生错误探测时,不会有任何错误报警。轻者影响测量结果,使得误差偏大,重者,测针更容易被折弯。
11.影响三坐标测量精度主要因素有哪些?
1)温度影响;2)湿度影响;3)压缩空气的影响;4)导轨的保护;5)测针校验的准确性;6)测量方法的准确性。
12.三坐标测量机的开机和关机应遵循的基本原则?
开机时,先开硬件,后开软件;关机时正好相反,先关软件,后关硬件。
13.探针校准的步骤?
1)安装主探针,固定标准球;
2)用主探针定义标准球位置,并校准主探针;
3)组装工作探针并校准。
14.探针校准超差,如何查找原因?
1)红宝石球或标准球上有灰尘;
2)探针或标准球没有紧固;
3)红宝石球或标准球损坏;
4)手动探测第一点偏差大。
15.探针校准的目的是什么?
探针校准主要有两个目的,一是获取红宝石球的补偿半径,二是获得其他探针相对于主探针的空间位置关系。
16.主探针和工作探针的校准顺序是否可以任意颠倒?
不能颠倒主探针和工作探针的校准顺序,一定要先校准主探针,之后再校准工作探针。
17.在建立工件坐标系中,空间旋转、平面旋转、原点选取元素时遵循的原则?
空间旋转:至少约束2个旋转自由度,选取时,必须是一个三维元素,例如,平面、圆柱、圆锥等。
平面旋转:约束剩下的旋转自由度,选取时,可以是一个二维元素,例如,直线。也可以是三维元素。
原点:限制三个轴向的平移自由度,选取时,可以是一维元素(点),但也可以选两维或三维的参考元素。
18.安全平面的作用是什么?
安全平面是一个将工件测量范围完全包裹的六面体空间,机器在元素和元素之间运行时,不允许探针的任何部分进入安全平面。如此一来,安全平面就起到了规划探针路径的功能。
19.安全平面有哪几个方向?
安全平面有CP +Z,CP -Z,CP +Y,CP -Y,CP +X,CP -X六个方向。
20.测量策略应遵循的原则?
①测量范围尽可能大;
②测量点数尽可能多,对于评定平面度、圆度、直线度、圆柱度等形状公差时,尽量采用扫描策略。
21.平面测量策略的方式主要包含哪些?
①点列表;②单点/自动路径转换开关;③网格测量;④多义线测量;⑤平面上的环形路径;⑥多义线组;⑦定义点。
22.评定设置时,元素的评定方法主要有哪些?
最小二乘法、最小区域法、最小外接法、最大内切法。
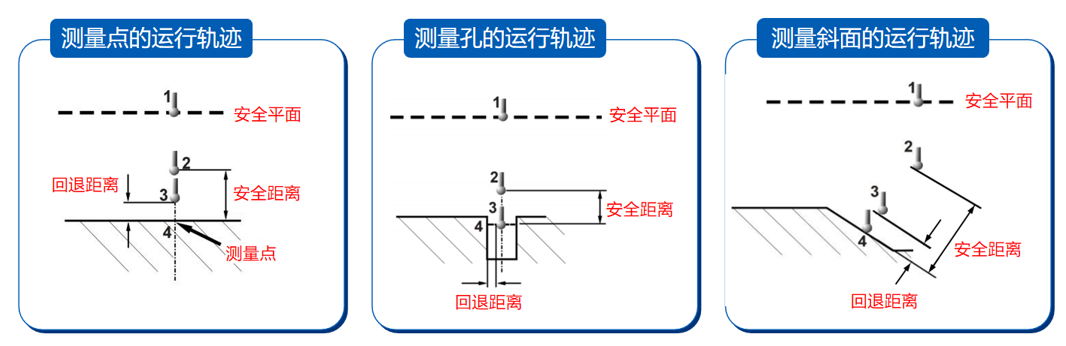
23.安全五项具体是哪五项?
安全五项是指安全平面、安全距离、回退距离、探针系统、测针。
24.请在下图中标注安全距离和回退距离。
1.滤波类型包含哪几种,对应的特点是什么?
滤波类型有三种,分别是低通滤波、带通滤波和高通滤波;
低通滤波:忽略了工件的粗糙度与波纹度,只有形状是可见的;
带通滤波:只允许某一高度的带宽或低频的部分通过,工件的波纹与形状是可见的,通常用来检测或确认工件的波纹度;
高通滤波:只允许工件表面的高频部分通过,工件的任何形状都不会被识别出来,只反映工件的粗糙度。
2.CALYPSO软件提供了哪几种滤波方法?
Calypso软件提供了四种不同的滤波方法,分别是高斯(Gauss)滤波、样条滤波、2-RC滤波和形态滤波。
1)高斯滤波:是坐标测量技术中的标准滤波方法,因此被广泛使用。计算原理是使用高斯曲线加权计算测量点得到新的轮廓。
2)样条滤波:是一种基于滤波方程的增强滤波方法(多项式计算)。样条滤波也是标准算法,更优于高斯滤波。
3)2-RC滤波:不再使用。圆度测量最初的标准化滤波器,但是已被现代滤波计算所取代。
4)形态滤波:基于ISO 16610-40/41的一种新的滤波方法。
3.旋转测头的A角和B角分别指什么?
A角指测头绕Z轴旋转的角度,顺时针为正,逆时针为负,角度范围为(-180°,+180°);
B角指测头的旋转角度,顺时针为负,逆时针为正,机器默认角度将B角限制在(-155°,+155°)。
4.主探针和工作探针的校准偏差应分别小于多少微米?
主探针的校准偏差应小于0.5μm,工作探针的校准偏差应小于1μm。
5.本项目中传动轴零件建立基础坐标系时,平面旋转应如何确定?
通过在键槽中创建对称点以确定x轴方向。
6.本项目中传动轴零件的公共基准A-B如何构造?
构造阶梯圆柱,采用【调用元素点】方式,调用圆柱2和圆柱3的元素点。
7.本项目中传动轴零件键槽侧面采用多义线测量策略,应注意哪些问题??
1)多义线选择位置尽量避免共线,且选取的点尽量避免靠近边界,防止探针无法获取该点位置。
2)设置回退距离尽量小于键槽宽度,防止出现撞针。
8.在测量圆柱1时,设置截面为3,如何保证探针测量时避开键槽?
已知键槽对称面为x轴正方向,因此将起始角设置为20°,角度范围设置为320°即可避开键槽。
9.进行评定设置时,什么时候需要勾选“滤波”和“粗差清除”
采用多义线、圆路径等扫描方式时,需要勾选“滤波”和“粗差清除”以去除异常值对测量结果的影响。
10.在圆柱3的圆路径扫描策略为什么需要多个安全设置?
因为圆柱3的一个完整截面测量需要2根测针,通过设置多个安全设置,可以保证探针在测量过程避免撞针。
11.如何利用“传输格式”将圆柱3的“测量策略”和“评定设置”复制给其他圆柱2?
单击【元素】标签页中的圆柱3,然后单击工具栏中的【传输格式】图标,在弹出【复制属性】对话框,勾选【评定设置】和【测量策略】,然后在【元素】标签页中单击圆柱2即可。
12.一个元素需要设置多个安全设置时,应注意哪些?
1)首先每个安全设置需要设置一个安全平面;
2)每个截面中需要选择对应的测针。
13.如何构造键槽对称面?
单击菜单【构造】→【对称】命令,双击打开对称1,依次选择平面2和平面3,单击【确定】,得到圆柱1键槽的对称平面。
14.当一个元素有多个安全平面时,在检查安全五项时,安全平面应如何检查?
首先在元素策略的每一个安全设置中指定正确的安全平面,然后在检查安全五项时,该元素的安全平面应是元素策略中指定的安全平面之一。
1.在CALYPSO软件中曲线轮廓度是如何计算的?
当实际点分布在名义轮廓两边时,曲线轮廓度按照极大偏差和极小偏差的差值计算,当实际点全部分布在名义轮廓一边时,曲线轮廓度等于极大偏差和极小偏差的绝对值较大值。
2.在CALYPSO软件中线轮廓度和面轮廓度是如何计算的?
CALYPSO软件中线轮度和面轮度按照极大偏差和极小偏差中绝对值的较大值的两倍计算。
3.对于不带基准的线轮廓度,在评定时需要做什么设置?
在最佳拟合设置中,勾选【沿X】【沿Y】【沿Z】【绕X轴】【绕Y轴】【绕Z轴】,那么该曲线轮廓度就消除了位置和角度误差,这时就是不带基准的曲线轮廓度。
4.利用旋转测头测量叶轮零件时,用了几根测针,对应的角度分别是多少?
共使用了7根测针,分别是1号针A0B90、2号针A90B-90、3号A0B90测针、4号A90B90测针、5号A0B-90测针、6号A-45B90测针、7号A135B-90测针。
5.叶轮零件平面1的测量策略,为什么需要设置2个圆路径和2个安全平面?
用一根测针无法测量平面1的一个完整圆路径,每根针最多测量角度为180°,因此设置了2个圆路径,为避免测针干涉,每个圆路径的角度范围是120°。
如果只设置一个安全平面,探针在测完第一个圆路径后,直接移动到第二根圆路径的起点位置,在测头移动过程中会发生撞针,因而需要设置2个安全平面,即测完第一个圆路径后退回到安全平面,然后再测量第二个圆路径。
6.创建3d曲线和自由曲线,需要使用【CAD】菜单中的什么命令?
【创建元素】命令。
7.如何阵列3d曲线?
在【元素】对话框中,选择名义数据为【阵列】,在弹出的【选择】对话框中,双击【回转阵列】。在弹出的【回转阵列】对话框中,输入角矩和阵列数量,单击【确定】,即可阵列的3d曲线。
8.进行曲线的评定设置时,为什么要设置前10个测量点和后10个测量点不用于评价线轮廓度?
因为测量开始时和测量结束时,测量力的变化会对测量结果造成影响。
9.如何创建自由曲面?
利用已知的曲线创建自由曲面,选择菜单【CAD】→【创建元素】命令,弹出【创建元素】对话框,元素选择【自由曲面】,生成路径选择【自由曲线(n)】,然后选择已知的曲线,单击【创建】即可。
1.光学影像仪的工作原理?
被测工件(置于工作台上)由LED表面光或轮廓光(工作台内)照明后,经变倍镜头,CCD(外罩内)摄取影像,将捕捉到的图像通过数据线传输到计算机的数据采集卡中,通过专用测量软件对其进行瞄准测量,通过Y轴向(纵向运动)、X轴向(横向运动)带动光栅尺在X轴、Y轴方向上移动,由测量软件完成测量工作。
2.与三坐标测量相比,用光学影像仪测量二维零件时,建立基础坐标系有什么不同?
用光学影像仪测量二维零件时,不需要设置空间旋转,Z原点选择自动聚焦点。
3. 用光学探头进行二维影像测量时,是否需要建立安全平面?
用光学探头进行二维影像测量时,CCD离工作台有安全距离,如果产品的高度不超过安全距离,探头和被测零件几乎不可能发生碰撞,可以不设置安全平面。但是不设置安全平面,CALYPSO软件会弹出警告,所以建议设置安全平面。
4.光学探头设置中0.5X表示什么?
表示放大倍数为0.5。
5.在【元素】选项卡中,如何区分自动聚焦点和普通测量点?
在【元素】选项卡中,自动聚焦点有一个“眼睛”图标,普通策略点则没有。
6.在什么情况下需要用到初定位坐标系?
通过手动探测的方式产生基础坐标系比较繁琐时,可以使用初定位坐标系。
1.蓝光三维扫描成像原理是什么?
通过光栅投影装置(或光斑)投影数幅特定编码的结构光到待测物体上,利用工业级的CCD摄像头同步采得相应图像,对图像进行解码和相位计算,结合匹配技术、三角形原理,解算出2个或3个摄像公共视区内像素点三维坐标,获得待测物体外型数据。
2.相比三坐标,蓝光三维扫描具有哪些优势?
1)非接触360°全周扫描。
2)速度快,易操作。
3)直观地进行整体比较。
3.标定板的作用是什么?
标定板也叫校准板,主要的作用是校准镜头畸变,保证设备在允许的误差范围之内。
4.GOM ATOS Q三维扫描仪的标定步骤一共有多少步,怎样判断校准符合要求?
GOM ATOS Q三维扫描仪的标定步骤一共18步,18步标定完成后,标定偏差和投影头标定右侧的图标都为“对号”时,说明校准结果正确。
5.注塑件扫描的步骤?
注塑件扫描主要由四个步骤组成,分别是扫描参数设置、注塑件正面扫描、注塑件反面扫描、正反面拼接并输出STL。
6.如何判断拍照过曝现象,如何调整?
当软件窗口中工件显示红色区域时,说明这些部位过曝了;通过调整参考点曝光时间,当软件窗口中所有参考点的颜色都不是红色时,说明参考点曝光时间合理。
7.为何需要进行正反扫描?
单一方向扫描时,如果出现零件扫描不全或遮挡的情况,则需要切换多个方向进行扫描,最后拼接,以获取零件的完整扫描模型。
8.零件正反面拼接,需要注意什么?
保证正反面都有公共参考点,且参考点不少于3个。
9.初始对齐中的预对齐、3点对齐和3-2-1对齐的区别?
预对齐:将模型离散成点云,以最大点云比例将实际模型与参考模型对齐。
3点对齐:取模型中3个特殊点,在3个特殊点对齐的基础上,保证模型大部分点云点对齐。
3-2-1对齐:基本用在RPS定位基准中, 假如在Z方向限定3个点的话,那么将限制Z方向的移动,X Y方向的转动;在Y方向限定2个点,将限制Y方向的移动和Z方向的转动;在X方向限定1个点, 将限制X方向的移动,此时将限制零部件的6个自由度。
10.什么是截面偏差?
任取某一截面,获得参考模型与实际模型的比对截面图,截面中实际模型数据与参考模型数据的偏差为截面偏差。
11.什么是局部最佳拟合对齐?
选取部分局部特征,优先对齐局部特征,在此基础上保证模型的最大比例对齐。
12.测量原理的作用是什么?
测量原理用于创建标称元素的实际对应部分,即把实际元素与标称元素相关联。
13.常用的测量原理有哪几类?
常用的测量原理有3类:
①对于点,测量原理通常选择与网格的交点;②对于大多数标准几何形状,测量原理选择拟合元素;③对于通过特定连续步骤推导出的元素,测量原理选择参考的构件
14.点的测量原理有哪些,请具体描述?
点的测量原理主要有两种,第一种是与网格的交点,第二种是投射点到实际网格。
1)与网格的交点。其原理是沿标称点的法向方向搜索,在标称点的法向与网格相交的地方创建相应的实际点,标称点与实际点之间的距离不一定是最短距离。
2)投射点到实际网格。其原理是创建一个其法向与标称点相交的实际点,标称点与实际点之间的最短距离。
15.标准几何形状的测量原理有哪些?
常用的方法主要有高斯最佳拟合、切比雪夫最佳拟合、最大内切元素和最小外接元素。
16.什么是RPS对齐?
RPS对齐是指定义各个点以锁定所有的六个自由度,在这些点处,CAD模型与实际网格之间的偏差应该为零或尽可能为零。这些点可以是曲面点,也可以是由几何元素得到的点。RPS对齐一般需要六个点,这六个点一般由图纸给定,不能随意定义。
17.什么是几何元素对齐?
定义几何元素,通过把实际元素跟标称元素对齐来锁定所有6个自由度。根据元素及其方向,可以锁定不同的平移和转动。第一个元素尽量多地锁定自由度;第二个元素尽量多地锁定剩下的自由度;第三个元素锁定最后剩余的自由度。
学校地址:江苏省无锡市高浪西路1600号 邮编:214121
联系电话:0510-81838822、85916000
 Copyright 2017 无锡职业技术学院,All Rights Reserved
Copyright 2017 无锡职业技术学院,All Rights Reserved
苏ICP备09025827号
 苏公网安备 32021102000438号
苏公网安备 32021102000438号
 官方微信
官方微信